Start Reading Here
First Time Setup
Firmware
-
Firmware: is low-level code embedded directly into hardware
(ROM/Flash) to control functionality, rarely updated, and essential for
booting (e.g., BIOS, router OS).
Software: is high-level, user-facing applications (e.g., Windows, apps) stored on disk, designed for user interaction and updated frequently.
| What | Runs on/Used for | Opensource | License | When to consider | |
|---|---|---|---|---|---|
| ArduPilot | See Below | planes, copters, rovers, subs | Yes | GPL | Long Range |
| ArduCopter | Ardupilot version. | multirotors and helicopters | Yes | GPL | |
| PX4 | Modern Firmware/Software runs NuttX OS | commercial, academic, or research applications | Yes | BSD | High Precision |
Ardupilot
-
- Firmware/Software having very large hobbyist community
- Flying drone has a Circuit board(Central Zero H7) on which Ardupilot or PX4 runs
- Ardupilot/PX4 communicates with Radiolink, rotors, camera etc
Install & Start ardupilot on WSL
|
It will pop up UI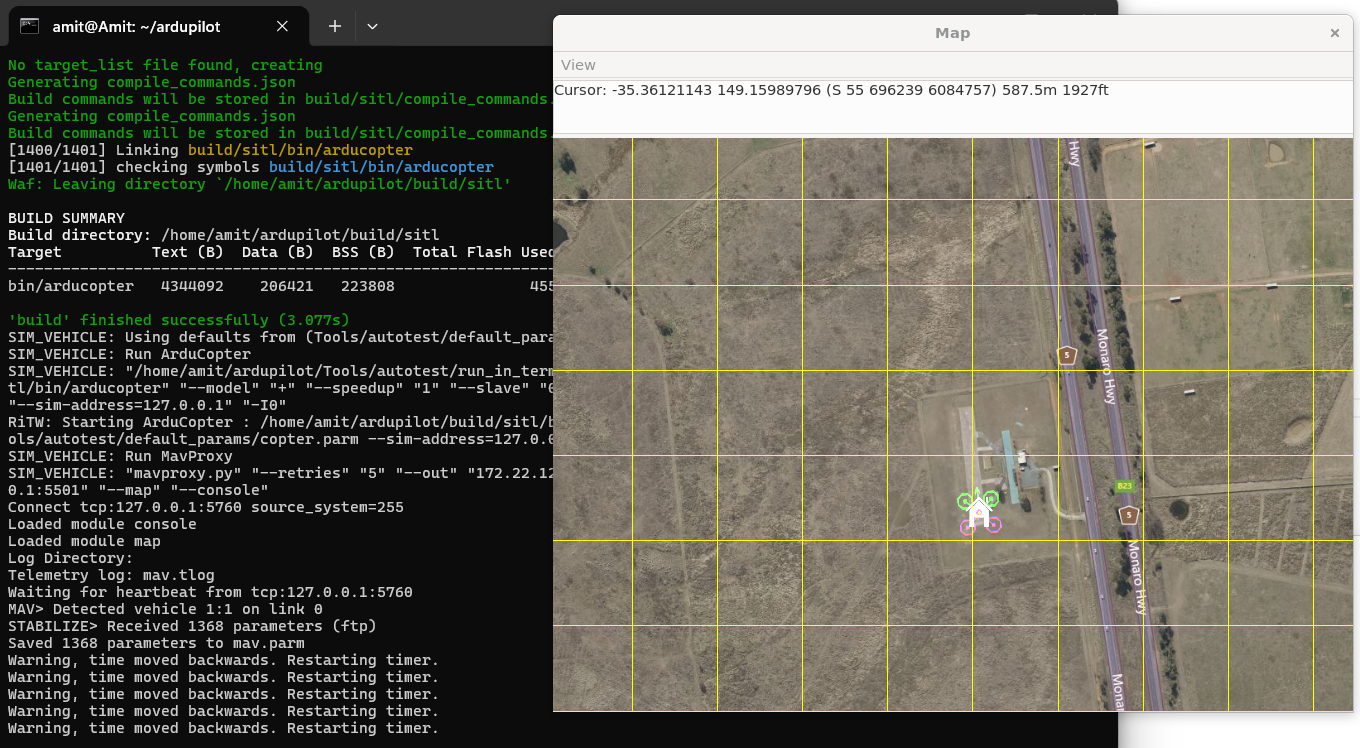
|
Hardware Board
| What | Bit | |
|---|---|---|
| APM(ArduPilotMega) | Older, obsolete flight controller board designed around 2011. | 8 bit |
| Pixhawk | Advanced | 32 bit |
SITL (Software-in-the-Loop)
-
SITL (Software-in-the-Loop) is a simulation technology allowing
developers to run autopilot code (like ArduPilot or PX4) directly on a
computer without physical hardware. It enables testing flight algorithms
and vehicle behavior in a virtual environment, preventing damage to real
drones.
Measuring Devices
| Device | Meaning |
|---|---|
| Gyroscope |
Gyro(meaning circle, ring), Scope(means to look at). This is a device used for measuring angular velocity of a device |
| Accelerometer | An accelerometer is a device that measures the proper acceleration of an object |
| Barometer | A device that measures atmospheric pressure. It calculate the drone's altitude relative to a takeoff point. Because air pressure drops with altitude, barometer can determine how high drone is flying. |